Fonctionnements et incidences sonores sur les Laing D4 et D5
Lorsqu’on utilise une pompe, on souhaite que celle-ci opère le plus silencieusement possible. Le bruit a plusieurs sources : les frottements dans les roulements à billes, le frottement des paliers qui soutiennent l’axe, les bruits hydrodynamiques, etc. L’électronique est le point de départ de ces bruits et peut engendrer des désagréments supplémentaires suivant sa conception.
D’un point de vue humain, le rotor semble tourner régulièrement, mais ce n’est pas tout à fait le cas en réalité. Il est sans cesse en train d’accélérer puis de ralentir (légèrement) suivant la position dans laquelle il se trouve par rapport aux bobinages du stator. Le couple n’est pas tout à fait constant, il varie légèrement et qui dit variation dit potentiellement vibrations et donc bruit. Cela vient du fait que le nombre de pôles au stator est un nombre fini (six positionnés à 60° en général). Plus il y a de pôles, plus le mouvement sera régulier, mais ça pose des problèmes de place.
La Laing D4 a une électronique simpliste dans le sens où les bobinages statoriques sont alimentés brutalement à l’aide de signaux de type rectangulaire. Si ce type de montage est facile à réaliser, ce n’est pas ce qu’il y a de mieux en ce qui concerne le bruit, car le rotor subit des petits à-coups à chaque fois que le courant traverse d’un seul coup les bobinages. C’est ce qui fait que la Laing D4 émet un bourdonnement désagréable en relation avec la fréquence de commutation des transistors (~300 Hz).
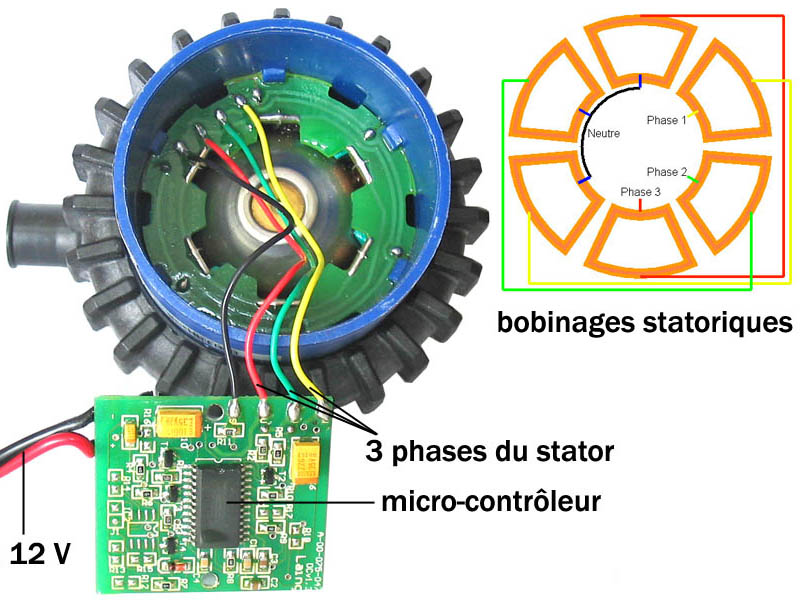
On prend la D4 en exemple, car le PCB est assez facile à étudier. Ci-dessous, on a les détails du côté commande et du côté puissance.
La D4 a six bobines statoriques couplées par paires symétriques, ce qui donne trois phases à deux bobines. Le microcontrôleur est le chef d’orchestre dans la pompe, c’est lui qui donne l’ordre de commuter tel transistor (= interrupteur piloté noté Q1 à Q6) à tel instant pour garder le synchronisme du mouvement.
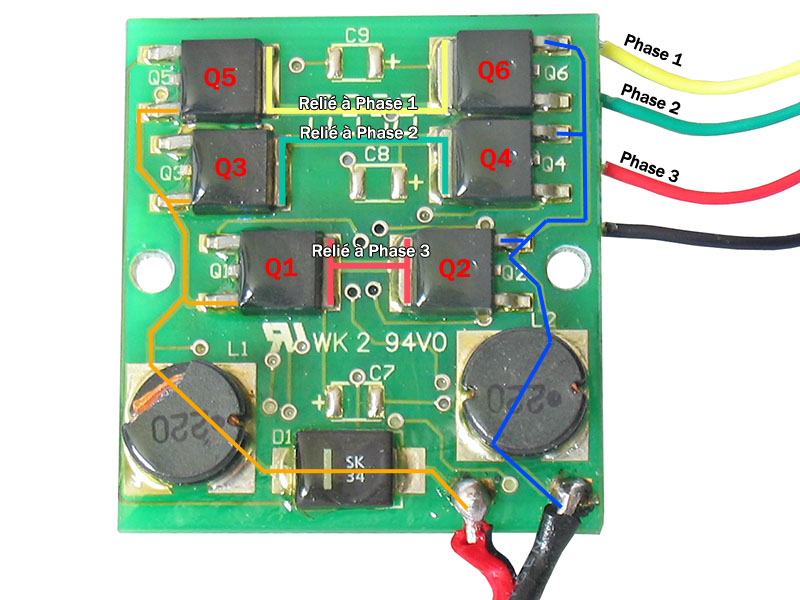
 Quand une tension de seuil est appliquée à la grande patte non coloriée du transistor (la grille), il devient passant presque instantanément et le courant peut alors le traverser pour aller vers certains bobinages. A un instant t donné, il n’y a que deux transistors qui sont passants en même temps : un du côté « haut H » 12 V (Q1, Q3 ou Q5) et un du côté « bas L » relié à la masse (Q2, Q4 ou Q6). La dernière condition est de ne jamais avoir les deux transistors formant une paire (Q1 et Q2, etc.) actifs en même temps sinon c’est un court-circuit direct entre le 12 V et la masse !
Quand une tension de seuil est appliquée à la grande patte non coloriée du transistor (la grille), il devient passant presque instantanément et le courant peut alors le traverser pour aller vers certains bobinages. A un instant t donné, il n’y a que deux transistors qui sont passants en même temps : un du côté « haut H » 12 V (Q1, Q3 ou Q5) et un du côté « bas L » relié à la masse (Q2, Q4 ou Q6). La dernière condition est de ne jamais avoir les deux transistors formant une paire (Q1 et Q2, etc.) actifs en même temps sinon c’est un court-circuit direct entre le 12 V et la masse !
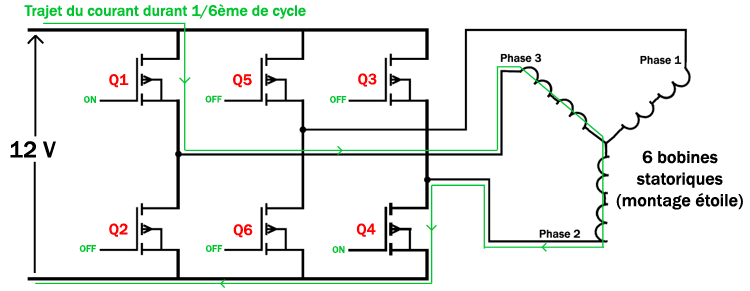
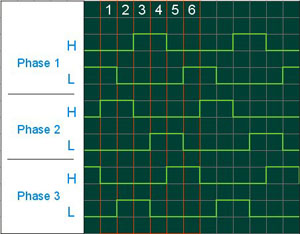
Tout l’art d’une bonne rotation est donc d’avoir une bonne synchronisation des six transistors quelle que soit la charge appliquée sur le rotor. Cette tâche est dédiée au microcontrôleur, plus ou moins complexe, qui est programmé pour donner les tops d’alimentation suivant un cycle précis. On peut représenter cela à l’aide d’un chronogramme qui montre qui est alimenté et à quel moment, cette séquence composée de six étapes se répétant indéfiniment.
Evidemment, pour savoir quand alimenter précisément, il faut connaître la position exacte du rotor au cours du temps. On obtient cette information de deux manières notamment. Soit on utilise des capteurs à effet Hall (cas des pompes AquaXtreme) pour détecter la rotation par interaction avec le champ magnétique d’un aimant, soit on détecte directement la tension induite qui apparaît dans le bobinage non alimenté à chacune des six étapes (effet dynamo).
On peut représenter le schéma de principe de la D4 et montrer l’une des six étapes à effectuer. On imaginera aisément les cinq autres possibilités en variant le ransistor alimenté. En mesurant la fréquence des impulsions sur ses bobines, on trouve une fréquence de 280 à 300 Hz suivant le débit.
Assouplissement électronique pour la Laing D5
La D4 utilise un pilotage agressif et très raide qui marche bien, mais on préférera maintenant un pilotage façon sinus pour alimenter les bobinages plus en douceur afin de diminuer les à-coups et donc le bruit. C’est ce que la Laing DDC propose depuis le début et c’est ce que l’évolution de la D4, alias la D5, propose désormais. Avec un nouveau microcontrôleur, on diminue drastiquement le bruit généré puisque cette pompe se révèle assez discrète. L’aspect mécanique n’est pas le seul critère à prendre en compte pour le bruit, l’électronique a aussi une importance capitale.
Pour créer des courants d’allure sinusoïdale dans les bobinages à partir d’une tension continue de 12 V, il va falloir ruser et c’est là que le potentiel des transistors MOSFET apparaît. Ceux-ci peuvent s’ouvrir et se fermer à très grande fréquence (plusieurs centaines de kilohertz aisément), ce qui permet de générer des formes complexes de signaux en jouant sur la largeur des impulsions délivrées. On peut ainsi changer localement la valeur moyenne du signal final, c’est ce que l’on appelle la MLI ou la Modulation de Largeur d’Impulsions (PWM en anglais).
Au lieu de laisser le transistor passant pendant x millisecondes pour avoir un courant de forme rectangulaire (tout ou rien), on va l’ouvrir et le fermer un très grand nombre de fois durant ces x millisecondes en envoyant des impulsions plus ou moins brèves afin de créer un courant d’allure sinusoïdale. La sinusoïde résulte donc du moyennage d’impulsions du type suivant.
A présent, si l’on tente de mesurer la fréquence d’alimentation des bobines de la D5 ou d’une DDC, on obtient une valeur bien plus élevée entre 10 et 15 kHz. La fréquence ne cesse de varier, car on a maintenant des impulsions de largeur variable contrairement à la D4 où les impulsions étaient de largeur constante sous une charge donnée, ce qui rend la mesure directe impossible pour le fréquencemètre qui ne peut pas se caler sur un signal non périodique. Il va sans dire que la commutation très rapide des transistors et les appels de courants engendreront un peu de bruit électrique sur la ligne du 12 V.
Avec ce genre de pilotage, le champ magnétique généré se développe de manière régulière et le rotor se retrouve accompagné en douceur avec un taux de vibrations réduit. C’est l’intérêt de la D5 par rapport à la D4, la différence de bruit est énorme entre les deux alors que la mécanique est rigoureusement identique.
Analyses spectrales des nuisances sonores entre la D4 et la D5
Une analyse fréquentielle du bruit généré par les deux pompes peut donner beaucoup d’informations sur l’origine des bruits alors que tout cela est imperceptible directement. On retrouvera notamment les fréquences principales que sont la fréquence de rotation du rotor et la fréquence d’alimentation des bobinages, ainsi que toutes les fréquences harmoniques qui en découlent. Ca permet de visualiser les différences sonores entre les deux modèles possédant une électronique différente.
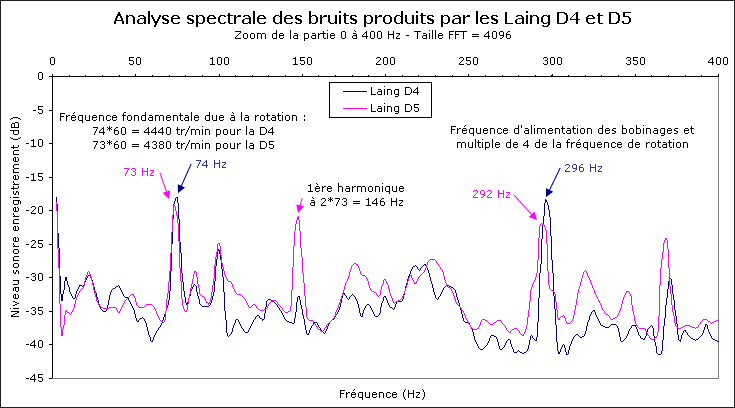
On enregistre de manière identique les deux pompes qui débitent dans un réservoir sous une certaine restriction pour simuler un circuit complet. La restriction étant la même, les deux pompes tourneront quasiment à la même vitesse pour faciliter l’étude, sinon ça n’a pas d’intérêt. Le tout est découplé et isolé sur de la mousse pour éviter toute vibration parasite. On s’intéresse d’abord à la partie basse fréquence du spectre sonore.
On trouve directement la vitesse de rotation sans avoir besoin d’un tachymètre. On a donc environ 4440 tr/min et 4380 tr/min pour les 2 pompes, c’est à dire que le rotor effectue simplement 73 et 74 tours par seconde.
On retrouve aussi exactement la fréquence d’alimentation, mesurée directement sur les bobinages au fréquencemètre, dans le bruit généré par la pompe, et notamment pour la D4. La MLI de la D5 rend impossible la mesure de fréquence sur les bobinages, mais la forme finale de la sinusoïde a évidemment la même fréquence que les signaux de la D4, car les rotors tournent à la même vitesse, d’où le pic à 292 Hz. On constate d’ailleurs que ce sont des multiples de quatre de la fréquence de rotation, tout est lié. Globalement, les deux pompes ont quasiment le même spectre dans cette partie basse fréquence, car la mécanique est identique.
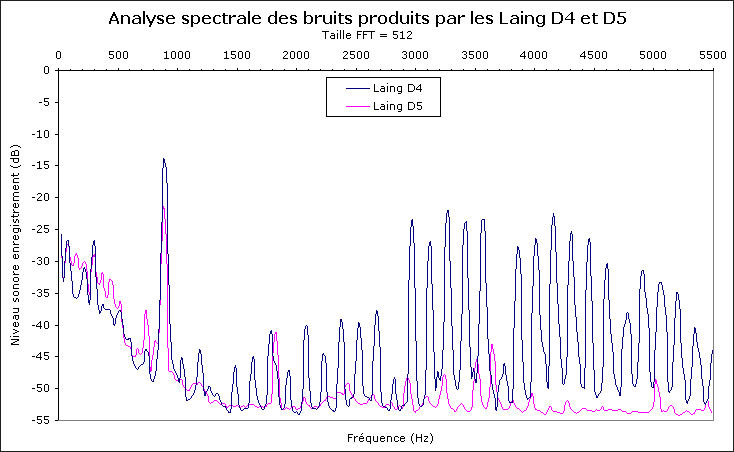
Il suffit d’élargir le spectre en allant vers les hautes fréquences, là où l’oreille est beaucoup plus sensible entre 1 et 4 kHz, et alors la différence entre les deux pompes ne peut pas apparaître plus clairement.
Le bruit de la D4 se « voit » et s’explique par la présence des dizaines de pics faiblement atténués de moyenne fréquence, représentant les harmoniques multiples de la fréquence de rotation du rotor. C’est cela qui rend son bruit particulièrement désagréable à l’oreille. En comparaison, la D5 ne possède quasiment pas de pics au dessus de 1 kHz et l’atténuation en dB est bien plus forte, ce qui explique qu’elle soit beaucoup plus silencieuse que l’ancienne D4.
Le choix de l’électronique par le fabricant est donc un choix déterminant sur la qualité et la façon dont la pompe va émettre du bruit. Il existe plusieurs types de contrôleurs brushless, du plus simpliste en tout ou rien jusqu’au plus complexe avec la MLI par exemple. Tout cela ne cesse de s’améliorer pour rendre le fonctionnement d’un moteur toujours plus souple et ainsi augmenter son rendement et ses qualités.




 Comparatif de pompes II – Page 16/18Rédigé par
Comparatif de pompes II – Page 16/18Rédigé par