Pourquoi du découpage ?
Principe de base
Une alimentation pour ordinateur est un système complexe qui doit être capable de fournir plusieurs tensions de manière régulée (3.3, 5, 12 et -12 V actuellement).
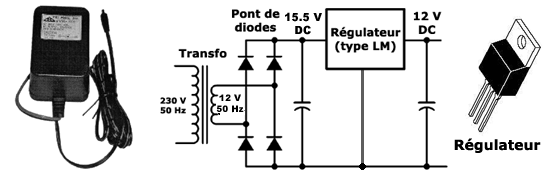
Les alimentations basse tension du type chargeur ou petit transformateur pour console, téléphone, etc. abaissent le 230 V alternatif à quelques volts à l’aide d’un transformateur, le redressent grâce à un pont de diodes, le lissent grâce à un condensateur et le régulent (pas toujours le cas) pour fournir du 12 V continu par exemple. C’est un système simple de ce type :
Le problème c’est que le régulateur linéaire, qui agit comme une résistance variable s’occupant de maintenir ce 12 V en sortie quelles que soient la tension d’entrée et la charge appliquée, occasionne une chute de tension (on passe de 15 à 12 V par ex.). Celle-ci génère donc des pertes et une puissance thermique qu’il faut évacuer.
Le rendement d’un tel système est très mauvais (25-50 %) car on dissipe beaucoup d’énergie inutilement, mais il est suffisant pour de très petites puissances car c’est très peu cher à fabriquer. Néanmoins, on emploie de plus en plus du découpage pour optimiser et réduire énormément la taille de ces adaptateurs. Si on utilisait ce genre de système linéaire pour alimenter un PC qui demanderait 300 W, il faudrait consommer pas loin de 900 W pour que le système fonctionne, avec une différence de 600 W qui partirait en chaleur ! En 50 Hz, il faudrait un gros transformateur, pesant pas loin de 10 kg, pour être capable de fournir 300 W, en plus des 600 W de pertes induites par la régulation, qu’il faudra bien dissiper….
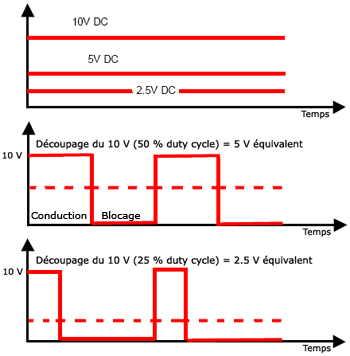
Il faut donc trouver une solution beaucoup plus efficace et c’est là que le découpage intervient. Pour faire simple, une alimentation à découpage transforme le 230 V alternatif en 325-400 V continu, puis hache cette tension à haute fréquence pour en faire un train de fines impulsions (durée = ~0.00001 seconde), dont la moyenne lissée et filtrée donnera les tensions nécessaires en sortie. Voici l’explication en images :
Le rapport cyclique (duty cycle en anglais) est le rapport entre le temps de conduction et le temps d’une période (conduction+blocage) de la forme en créneau. Si on hache du 10 V avec un rapport cyclique de 50 %, on obtient du 5 V en moyennant le signal obtenu. Si on hache ce 10 V à 25 % maintenant, on obtiendra du 2.5 V et ainsi de suite. Il suffit de calculer le bon rapport entre le temps de conduction et la valeur de la tension à découper pour avoir ce que l’on souhaite en sortie.
Comment découpe-t-on une tension ?
Pour découper la tension, on n’utilise rien d’autre qu’un interrupteur qui va s’ouvrir et se fermer très rapidement. Cet interrupteur électronique est un transistor (technologie bipolaire ou MOSFET) que l’on pilotera tout simplement en ouverture et en fermeture (régime de commutation). Le processus se fait à une fréquence de plus de 20 kHz pour être au dessus des fréquences audibles par l’homme. En général, on se trouve entre 32 et 100 kHz, mais ça peut monter beaucoup plus haut vers le mégahertz suivant l’application. C’est d’ailleurs ce que l’étage d’alimentation d’un processeur fait en découpant le 12 V à près de 500 kHz pour sortir une tension stabilisée entre 1 et 2 V avec un très fort courant, quelles que soient les conditions.
Pour éviter les pertes inutiles, il suffit simplement de ne pas d’avoir la tension et le courant en un même point au même instant. Ici, l’interrupteur n’a que 2 états, soit il laisse passer le courant (état passant) soit il l’empêche de passer (état bloqué), donc théoriquement la tension et le courant ne sont jamais présents en même temps. Quand le transistor est bloqué, le courant qui le traverse est nul et quand il est passant, la tension à ses bornes est nulle (toujours en théorie). En réalité, le transistor n’est pas parfait et occasionne des pertes à son ouverture et sa fermeture car ce n’est pas instantané (pertes par commutation) et aussi lorsque le courant le traverse car il a une résistance très faible mais pas nulle (pertes par conduction).
Au final, les pertes occasionnées aux transistors en régime de commutation sont quand même infiniment plus faibles qu’en régime linéaire pour le régulateur. Voici l’illustration du phénomène décrit au dessus :
Pour réduire les pertes au maximum, une alimentation à découpage utilisera donc des éléments non dissipatifs (en théorie) du genre transformateur, inductance, interrupteurs électroniques, condensateurs. Alors qu’un système linéaire permet un rendement de 25-50 %, les meilleures alimentations à découpage (tous domaines confondus) permettent d’atteindre 70 à 95 % !
Le fait de découper à haute fréquence est important car plus on découpe vite, plus on peut réagir vite face aux sollicitations extérieures, plus on manipule de petites quantités d’énergie et plus on peut réduire la taille des composants. Pour un transformateur, sa taille est inversement proportionnelle à sa fréquence d’utilisation. C’est pour cela qu’on trouve des monstres (transformateurs toriques très lourds) dans les amplificateurs audio pour éviter le découpage car ça implique de filtrer les nombreux parasites générés (ça coûte cher) et les audiophiles n’aiment pas vraiment les parasites. On peut aussi réduire la valeur des condensateurs et l’encombrement des autres éléments car on travaille sur de toutes petites quantités en un temps donné. A 50 kHz, un petit transformateur suffit à fournir une grosse puissance sans problème. Les alimentations à découpage permettent alors d’avoir des puissances volumiques en W/cm3 (rapport puissance/encombrement) très élevées car les éléments ne prennent pas trop de place et on peut sortir des grosses puissances.
A priori, le découpage apparaît donc comme une solution idéale, mais il a des inconvénients notables au niveau de la compatibilité électromagnétique notamment. Outre le fait que ce soit bien plus complexe et plus cher à faire qu’une alimentation linéaire, le découpage engendre un tas de parasites et une ondulation qu’il est impératif de filtrer en sortie (normes sévères là dessus). Découper très vite génère des pics et des variations ultra rapides de la tension et du courant, et qui dit variations rapides dit interférences et rayonnements électromagnétiques. Ces parasites prennent la forme d’interférences électromagnétiques (EMI en anglais pour Electromagnetic Interference) rayonnées ou réinjectées par conduction dans les fils vers le réseau. Il faut absolument les contenir et les atténuer pour éviter de polluer l’environnement électrique proche.
Pour le premier type, le châssis en acier agit comme un blindage pour atténuer les émissions radiofréquences qui peuvent perturber la réception de la TV ou de la radio par exemple. Le deuxième type est plus compliqué à gérer car il faut mettre en place des filtres en ligne pour les absorber. Ces filtres sont évidemment présents dans les bonnes alimentations et souvent de manière incomplète dans les alimentations bas de gamme pour réduire les coûts. Ils protègent aussi bien l’alimentation du bruit électrique qui circule sur le réseau, que le réseau des parasites hautes fréquences générés par le découpage, ça marche dans les 2 sens.




 Fonctionnement d’une alimentation – Page 2/25Rédigé par
Fonctionnement d’une alimentation – Page 2/25Rédigé par