Correction active du facteur de puissance
Un PFC actif est un petit module intercalé à l’entrée de l’alimentation et géré par un contrôleur intégré qui analyse et corrige en temps réel l’allure du courant par rapport à la tension. Il en déduit les erreurs de forme par comparaison avec la sinusoïde redressée de la tension et il les corrige en contrôlant le flot d’énergie grâce à un découpage haute fréquence et un stockage d’énergie dans une inductance. Son rôle est d’obtenir un courant non déphasé et le plus sinusoïdal possible en entrée de l’alimentation.
Il est capable de s’adapter à quasiment n’importe quelle situation en entrée car c’est lui qui gère l’énergie envoyée vers l’étage de découpage. On peut par exemple se passer du switch 115/230 V présent sur certaines alimentations sans PFC ou à PFC passif car c’est utilisable partout dans le monde (95-260 V). On pourrait dire qu’il y a quasiment découplage entre le réseau et l’alimentation.
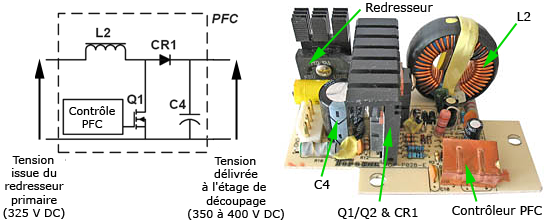
Là aussi, il existe d’innombrables manières de concevoir un PFC actif avec des topologies dites buck, boost, buck-boost (ordre 2) et jusqu’à des modèles complexes d’ordre 4. La topologie boost (montage élévateur) est la plus répandue pour nos alimentations. On la retrouve dans les Tagan par exemple et celle que l’on va étudier. Voici le module PFC démonté d’une Tagan et son schéma de principe :
Ce module est simplement composé d’une inductance L2, d’un MOSFET qui sert d’interrupteur piloté Q1 (le module présenté en utilise 2 en parallèle), d’une diode rapide CR1, d’un condensateur C4 et d’un contrôleur PFC intégré (sous la feuille de cuivre) avec sa circuiterie.
Le MOSFET travaille à haute fréquence pour limiter la taille des composants et faire des corrections de forme extrêmement précises. On utilisera encore une fois les propriétés des inductances sur la continuité obligatoire des courants en leur sein. Au moment où l’on interrompt le courant qui la traverse, on obtient aussi une tension inverse à ses bornes qui devient très élevée (le fameux U=L*di/dt) et qui vient s’additionner à la tension d’entrée.
Au final avec ce montage, on va pouvoir générer des tensions plus élevées en sortie très facilement (d’où le terme « boost ») par rapport à l’entrée. Ca permet de travailler plus efficacement avec l’étage de découpage entre 350-400 V DC (mesuré à 352 V aux bornes du condensateur sur une Tagan U01) tout en ayant moins de pertes par conduction car le courant qui circule est plus faible. Le condensateur en sortie du PFC se chargera grâce à l’inductance quand Q1 sera bloqué et il fournira l’énergie nécessaire pour maintenir le niveau de tension par rapport à la charge quand Q1 sera passant pour charger L2.
En contrôlant le chargement de l’inductance et le relâchement de l’énergie emmagasinée dans cette inductance, on va modifier l’allure du courant tiré sur le réseau. On va imposer son allure suivant l’état du transistor Q1, qui définit le comportement de l’inductance L2. Le contrôleur régule aussi la tension en sortie du PFC en même temps (suivant la charge). Si l’on exagère très fortement l’allure de ce courant, voici à quoi il ressemble sur une période de 10 ms :
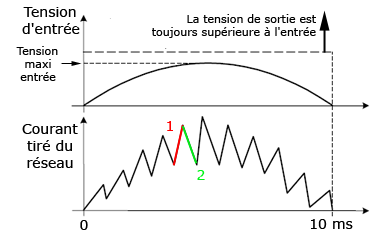
Le courant est en forme de dent de scie, elle même portée par une sinusoïde bien calée (en phase) par rapport à la tension. Quand le transistor Q1 devient passant, la diode CR1 se bloque et la tension aux bornes de L2 fait croître linéairement un courant qui la charge en énergie magnétique ; on est alors sur une phase montante (n°1 en rouge). Quand Q1 se bloque, l’énergie emmagasinée dans l’inductance fait naître un courant qui va se diriger vers la charge et le condensateur pour le charger, en traversant la diode CR1 devenue passante ; on est alors sur la phase descendante (n°2 en vert).
En jouant sur le temps de conduction-blocage du transistor, on fera varier la quantité d’énergie stockée dans l’inductance. Il suffit maintenant d’imaginer des dents de scie infiniment plus petites (ouverture-fermeture rapides de Q1) et l’on comprend aisément que l’allure du courant tiré du réseau tend vers une sinusoïde parfaite avec une valeur crête à crête bien plus faible qu’une alimentation sans PFC. On a étalé la demande de courant dans le temps et le facteur de puissance peut maintenant aller de 0.8 à 0.999 suivant la charge demandée :
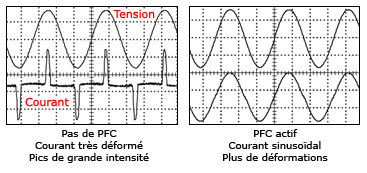
Finalement, ce PFC actif agit comme si l’alimentation était une résistance pure vue de l’extérieur, c’est à dire que le courant est en phase avec la tension et il est sinusoïdal sans déformations. L’efficacité du transport énergétique est alors maximale. On ne fait pas circuler de courants inutiles et on ne pollue pas le réseau avec un tas d’harmoniques. C’est beaucoup plus efficace qu’un PFC passif. De plus, le facteur de puissance ne s’effondre pas quand on augmente la charge, et au contraire il ne fait que se rapprocher de 1 s’il est bien conçu.
Les avantages d’un PFC actif sont nombreux. Sa mise en place évite la surcharge des installations électriques et permet de faire des économies d’électricité pour ceux qui doivent payer la puissance réactive (entreprises notamment). Il améliore le fonctionnement de l’alimentation lors des microcoupures ou des petites variations de tension sur le réseau car le contrôleur PFC analyse tout (courant et tension), fait office de tampon et stocke de l’énergie dans son condensateur de sortie. Le temps de maintien (hold-up time) est généralement un peu meilleur. Il délivre une tension continue et bien régulée à sa sortie pour alimenter l’étage de découpage, sans stress excessif.
Néanmoins, il possède aussi quelques inconvénients. Comme son nom l’indique, c’est un module actif donc il occasionne des pertes (MOSFET et diode notamment). Un module PFC actif seul a un rendement électrique d’environ 94 %, alors qu’un PFC passif est à environ 97 %. L’ajout d’un module actif tend donc à réduire le rendement d’une alimentation de 1 à 5 % suivant la charge qu’on lui demande. On peut le remarquer avec les alimentations sans PFC, destinées au marché US, qui ont toujours un meilleur rendement que les modèles européens dans des conditions identiques. Néanmoins, un PFC actif permet d’avoir un convertisseur DC-DC un peu plus efficace grâce à la tension élevée donc ça compense un peu les pertes qu’il produit, mais en partie seulement. Un PFC n’a rien à voir avec le rendement et il ne l’améliore pas ! En augmentant le nombre de composants, on augmente aussi statistiquement le nombre de pannes. On augmente enfin le coût et la complexité, même si les contrôleurs sont de plus en plus souples à utiliser. Du fait du découpage, il génère des parasites (harmoniques) et il est alors nécessaire de bien dimensionner les filtres en ligne à l’entrée pour éviter de les renvoyer sur le réseau.




 Fonctionnement d’une alimentation – Page 15/25Rédigé par
Fonctionnement d’une alimentation – Page 15/25Rédigé par